
Machina CNC perforandi et tondendi vectes communes GJCNC-BP-60







Singula Producti
GJCNC-BP-60 est instrumentum professionale ad vectes communes efficaciter et accurate tractandos destinatum.
Dum fabricatur, haec machina fibulas sponte reponere potest, quod maxime efficax est pro longis vectibus omnibus. His matricibus fabricatoriis in bibliotheca instrumentorum, haec machina vectes omnibus perforando (foramina rotunda, oblonga, etc.), embossando, tondendo, sulcando, angulos arcuatos secando, et cetera, fabricare potest. Res perfecta per convectorem adferetur.
Haec machina cum flexore CNC et linea productionis processus vectis omnibus formae congruere potest.
Persona Primaria
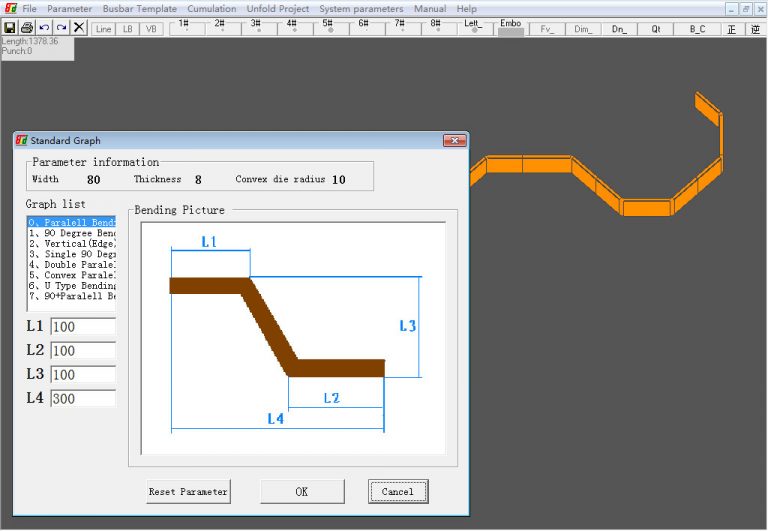
GJ3D / programmatura programmandi
GJ3D est programmatura specialis designationis adiuvatae ad processus vectis distribuendi (busbar). Quod codicem machinalem automatice programmare, singulas datas in processu computare, et simulationem totius processus ostendere potest, quae mutationem vectis distribuendi gradatim clare demonstrabit. Hae characteres commodum et potentem reddiderunt ad vitandam implicatam codificationem manualem cum lingua machinali. Et totum processum demonstrare potest et efficaciter impedit iacturam materiae causatam per input incorrectum.
Per annos societas nostra principatum gessit in applicatione artis graphicae tridimensionalis ad industriam processus vectium communium. Nunc tibi optimum programmatum designandi et moderandi CNC in Asia praebere possumus.
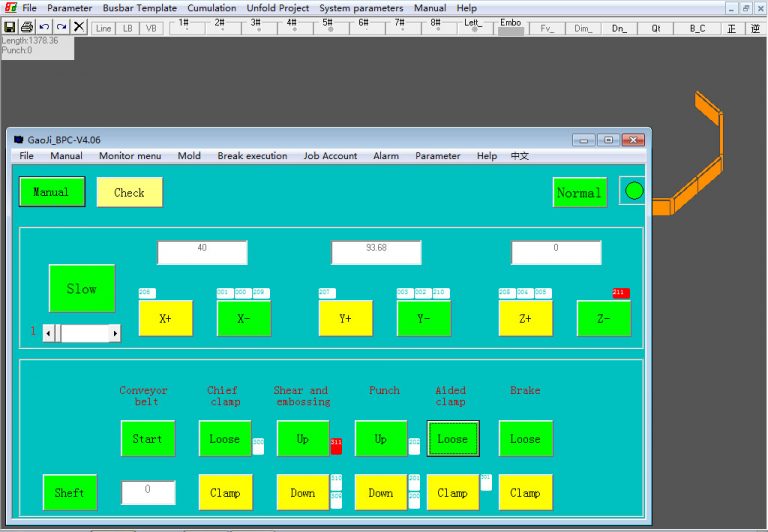
Interfacies hominis et computatri
Ut melior experientia operationis et informationes utiliores praebeantur, apparatus interfaciem hominis-computatralem RMTP 15" habet. Hac unitate, informationem claram de toto processu fabricationis habere potes, si forte alarma oriatur, et apparatum una manu regere.
Si necesse est tibi informationes de configuratione instrumenti vel parametros fundamentales matricis modificare, etiam diem cum hac machina inserere potes.
Structurae Mechanicae
Ut structuram mechanicam stabilem, efficientem, praecisam et diuturnam efficiamus, cochleam globularem summae accuratae, ductorem linearem praecisum a Taiwan HIWIN, et systema servomotoricum a YASKAWA, una cum nostro singulari systemate duarum fibularum, eligimus. Haec omnia supra scripta systema transmissionis tam bonum quam requiris efficiunt.

Programma substitutionis automaticae elaboramus ut systema constringendi efficacius fiat, praesertim ad tractationem longarum vectium communium, et etiam laborem operatoris quam maxime minuamus. Plus valoris pro clientibus nostris creamus.
Duo genera sunt:
GJCNC-BP-60-8-2.0/SC (Sex perforationes, una tonsura, una pressio)
GJCNC-BP-60-8-2.0/C (Octo perforationes, una forfice)
Eligere potes exempla quae tibi necessaria sunt
Involucrum Exportationis


Parametri Technici Praecipui
| Dimensiones (mm) | 7500*2980*1900 | Pondus (kg) | 7600 | Certificatio | CE ISO | ||
| Potentia Primaria (kW) | 15.3 | Tensio Ingressa | 380/220V | Fons Energiae | Hydraulicus | ||
| Vis Producta (kn) | quingenti | Celeritas Percussionis (hpm) | CXX | Axis Moderationis | Tres | ||
| Maxima Magnitudo Materialis (mm) | 6000*200*15 | Maximae Foraminae | 32mm (Crassitudo materiae infra 12mm) | ||||
| Celeritas Loci(Axis X) | 48m/min | Ictus Cylindri Perforatoris | 45mm | Repetibilitas Positionis | ±0.20mm/m | ||
| Ictus Maximus(mm) | Axis XAxis YAxis Z | MM530350 | QuantitasofMoritur | PugnitioTonsuraEmbossing | VI/VIII1/11/0 | ||
Configuratio
| Partes Moderationis | Partes Transmissionis | ||
| PLC (Programmata Computatralis) | OMRON | Dux linearis accurati | Taiwan HIWIN |
| Sensoria | Schneider Electric | Cochlea globosa praecisa (series quarta) | Taiwan HIWIN |
| Globulus Moderationis | OMRON | Fasciae fulcimenti cochleae globosae | NSK Iaponica |
| Tactus Tegumentum | OMRON | Partes Hydraulicae | |
| Computatrum | Lenovo | Valva Electromagnetica Altae Pressionis | Italia |
| Contactor AC | ABB | Tubus altae pressionis | Italia MANULI |
| Interruptor Circuitus | ABB | Antlia altae pressionis | Italia |
| Motor Servo | YASKAWA | Programma moderationis et programmata adiuvandi tridimensionalia | GJ3D (programmatura subsidiaria 3D a societate nostra omnia designata) |
| Servomotor | YASKAWA | ||









